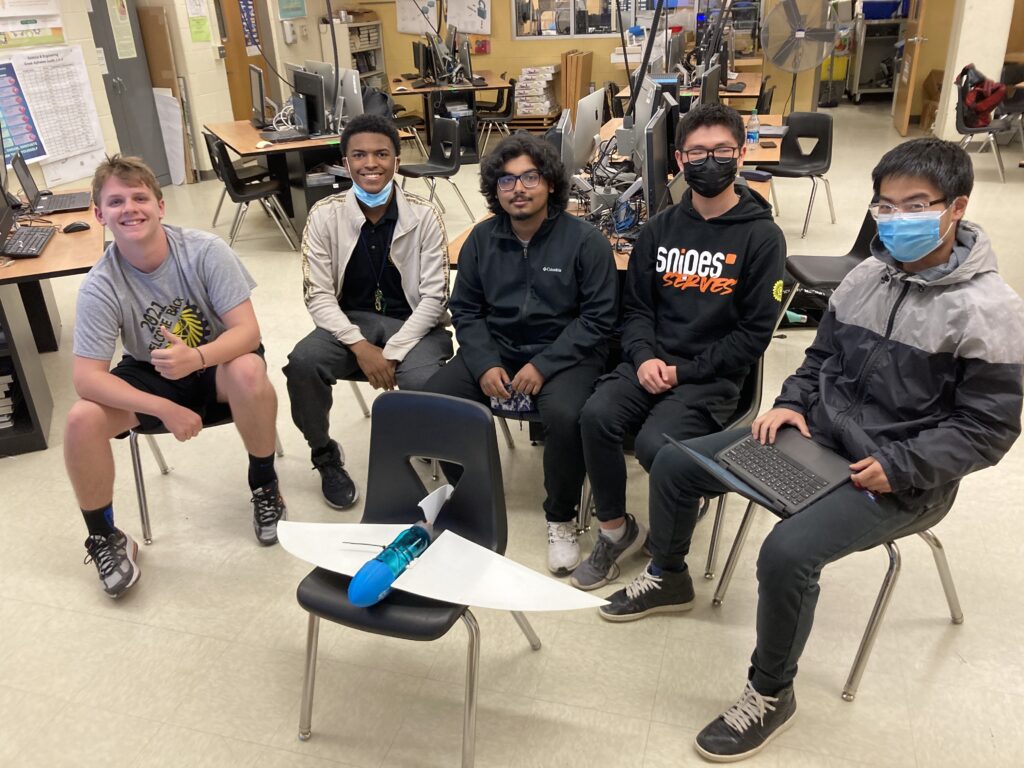
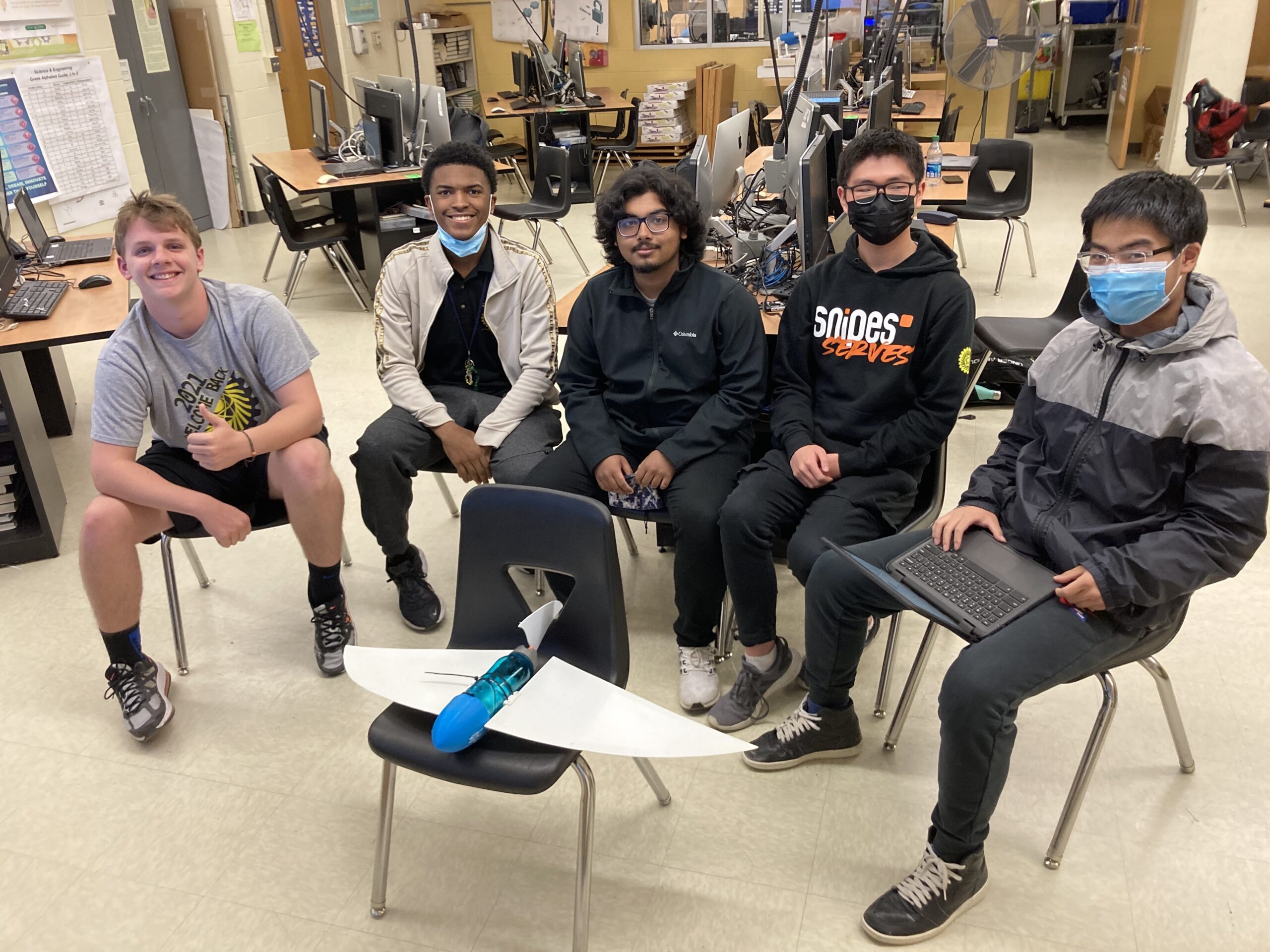
Congratulations to the E&S team which earned 3rd Place in the ‘Circuit & Coding Bug Hunt’ event at this year’s SeaGlide competition at Temple University! The E&S SeaGlide robotics rookie team is led by co-captains senior Christian Ricks and sophomore Tyler Baughman. Senior Adittya Siyam took on the lead mechanical and electrical engineering role with support provided by senior Jason Ou and juniors Alvin Chen and Mayeeduz Zaman. The student team uses experience and knowledge from E&S engineering elective classes and projects in electronics, robotics, and engineering. Adittya modeled and designed a hydrodynamic nosecone in CAD software and then 3D printed the prototype. The team modeled and crafted robotic wings in the school’s prototyping lab inspired by research on similar ocean creatures. They further applied their creativity to design a complete solution to naval missions in the E&S engineering & robotics club after school. The team formally presented their design to a panel of US Navy engineers and then competed in a robot performance event at Temple University’s pool in April.

How does the robot work?
Full-scale underwater robot gliders require very little energy and can be fully or partially autonomous, allowing them to deploy for months at a time to collect valuable data about the world’s oceans. This SeaGlide robot glider is an Autonomous Underwater Vehicle (AUV) is a foot long and moves by changing its buoyancy, taking in or expelling water, and shifting its center of gravity so it may dive or rise in the water. As the glider completes its dive and rise cycles, its wings generate lift, propelling the glider forward.
The SeaGlide competition consists of an educational platform for deeper learning toward careers in naval architecture, marine engineering, climate science, computer science and electronics. The students are encouraged to build upon the basic kit arrangement to innovate and create unique AUV designs to meet specific naval mission scenarios.
Recent Comments